Autonomous Driving
Exploring autonomous driving and driver assistance solutions specifically tailored for Indian roads, taking into account diverse traffic, frequent congestion, unpredictable pedestrian movement, and varying road infrastructure.
Autonomous Vehicle Testbed
The test vehicle is a four-seater equipped with a 5 kW ACIM motor and is designed for low-speed operation. The primary goal of this platform is to demonstrate key capabilities in autonomous driving and safety features.
The perception stack consists of two cameras, LiDAR, an IMU, and radar.
The major areas of research conducted on this platform include perception, low-speed adaptive cruise control (ACC), software development, safety and driver takeover mechanisms, and brake blending for improved user comfort.
The ASL Lab is developing a complete low-speed autonomy stack with potential applications in:
- Low-speed traffic scenarios
- Campus environments (institutes or corporate parks)
- Airports and shipyards
- Other controlled or semi-structured environments
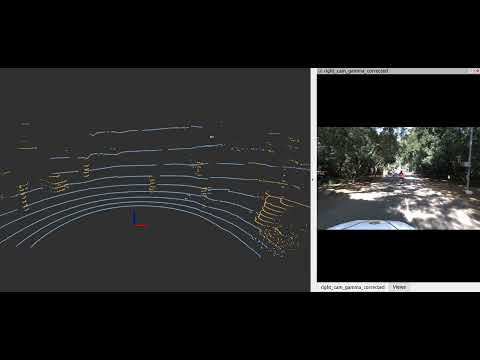
Perception for autonomous navigation
Preliminary results on percpetion for autonomous driving is shown below:
The video visualizes detections from the LiDAR point cloud fused with camera-based detections to provide classification for the LiDAR detections. This represents an initial version of the 3D object detection pipeline. Further work is ongoing to implement multi-object tracking and trajectory prediction for the detected objects.
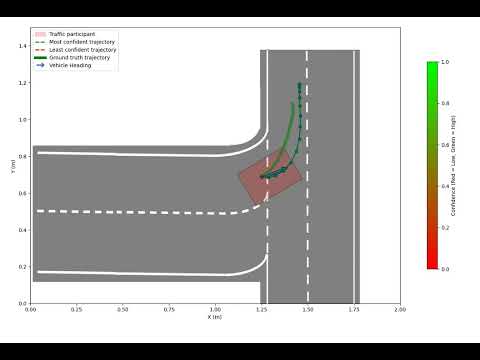
Trajectory prediction of surrounding vehicle
This research work aims to predict the future trajectories of surrounding vehicles. Trajectory prediction is crucial for motion planning and vehicle control to ensure safer operation. This work presents a framework for multi-hypothesis trajectory prediction of detected vehicles over a fixed time horizon.
Steer by wire
The vehicle does not have inherent drive-by-wire capabilities. As a first step, steer-by-wire functionality was implemented. This was achieved by attaching a BLDC motor to the steering shaft to actuate the steering. Work is currently underway to enable smooth driver takeover through the steering interface.
The video shows the retrofitted BLDC motor mounted on the steering column, enabling steer-by-wire control.

Drive by wire
As the next step, full drive-by-wire capability was implemented in the vehicle, including control over the throttle, motor brake, and manual brake using a linear actuator. The system also incorporates a safety override feature that allows the driver to take control through the throttle pedal, brake, or steering input.
The video shows the vehicle being remotely controlled using a joystick.

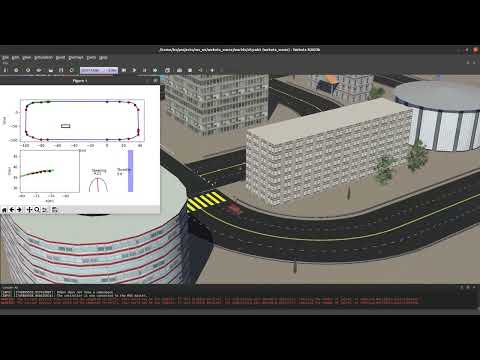
Autonomy Software stack
Here we presents the initial results from ground-up development of a complete software stack for autonomous driving being developed in ASL. Currently, the stack includes modules for a global planner, local planner, and vehicle controller. The architecture is highly modular and is designed to operate independently of any specific simulator or ROS framework.
The simulation presents L2 lvel Autonomy, and uses ROS2 and the Webots simulator, demonstrating local planning, steering control, and longitudinal control.